Treaded All Terrain LT Robot Support Page
 |
 |
LT Tracked Robot Kit
LT-F Tracked Robot Kit
LT-F Tracked Robot Surveillance Package
Contact Us for a custom designed/built special purpose ATR
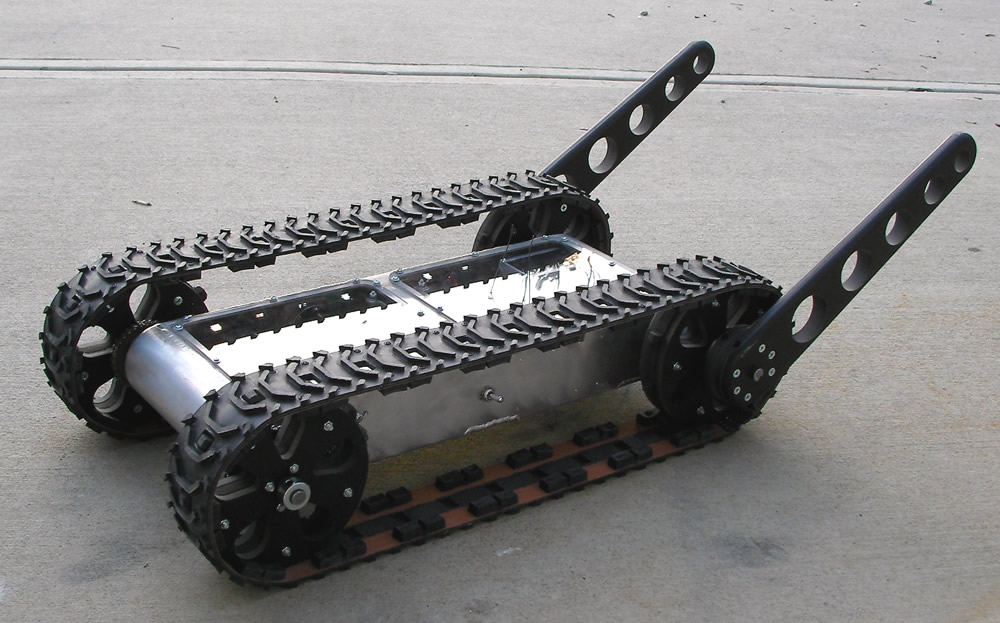
This robot is our smaller treaded robot that can be used to climb stairs. It can climb over many obstacles that are a lot taller than itself by using the flipper arms. The robot's flipper arm can lift its nose up, stabilize it from flipping over, and/or lift itself up. The arms can also be used to right itself after flipping over.
This robot is not meant for carrying heavy loads or pulling heavy objects like our HD2 Treaded Robot. The robot is a light weight tough little robot that can go over and under many obstacles. With the flipper arm it is highly maneuverable. The front wheels are driven with powerful IG52 gear motors with #25 chain. The chassis is made from aircraft grade aluminum. The design uses all laser cut parts with mortise and tenon design for precise alignment and mating of the parts. We weld all the aluminum together using TIG and MIG for a solid chassis. The top of the robot is open and can be enclosed with an acrylic cover. The treads are driven by powerful motors and the flipper arm allow this robot to ascend and descend stairs. We have designed this robot to be as simple as possible without compromising its strength, durability, or functionality.The new chassis are made from 1/8" thick aluminum that is laser cut then bent on a CNC break press. The seams are joined via TIG welding. A laser cut aluminum 1 piece lid mounts on top of the bent chassis.
The robot axles are solid high strength steel so they will not bend when the robot is dropped. The rear shaft is mounted on sealed needle bearings and keyed to accept the machined flipper arms and the custom gearbox and a IG42 gear motor.
The robot chassis is symmetric and invertible. The robot can be driven by a simple RC system, one of our custom controllers, or a PC. Contact us for providing a custom control solution. See our Military and Law Enforcement page for some custom control solutions we have provided.
The robot has the ability to climb stairs and go over most terrain. We have spent a lot of time developing this robot so you can use it from the beginning with no issues. The treads are ~3" wide with an aggressive All-Terrain rubber pattern. The treads are reinforced with a nylon mesh with a black rubber tread. We put on tracking guides using a custom jig. We then coat the inside with a highly abrasive resistant high traction rubber to grab the ~6.5 inch custom drive wheels (7 inches with the teeth). The tracks are CNC cut to match custom CNC toothed wheels. The chassis is approximately 3 inches high x 8.25 inches wide x ~19 inch wheel center distance length. The total width of the robot is about 17 inches wide with the flipper arms. The center cavity is large enough for for the motors, batteries, electronics, cameras, etc. The top is flanged with laser cut holes that are tapped for mounting an acrylic cover. The robot is currently geared with a 1:2 reduction (gear motor to drive wheels). Custom gearing can be requested. The OD of the wheels with the tread is about 7 inches, so with the Type 02 IG52 290 RPM motors ground speed is about 4.5 ft/sec.The LT robot weighs about 30 lbs and the LT-F weighs about 35 lbs depending on options, etc.
Click on pictures for larger views |
||
|
 |
|
|
|
Compact Rugged Light Weight Custom Robots
Color and IR night vision Inspection Robots for IED Inspection, Security, Military
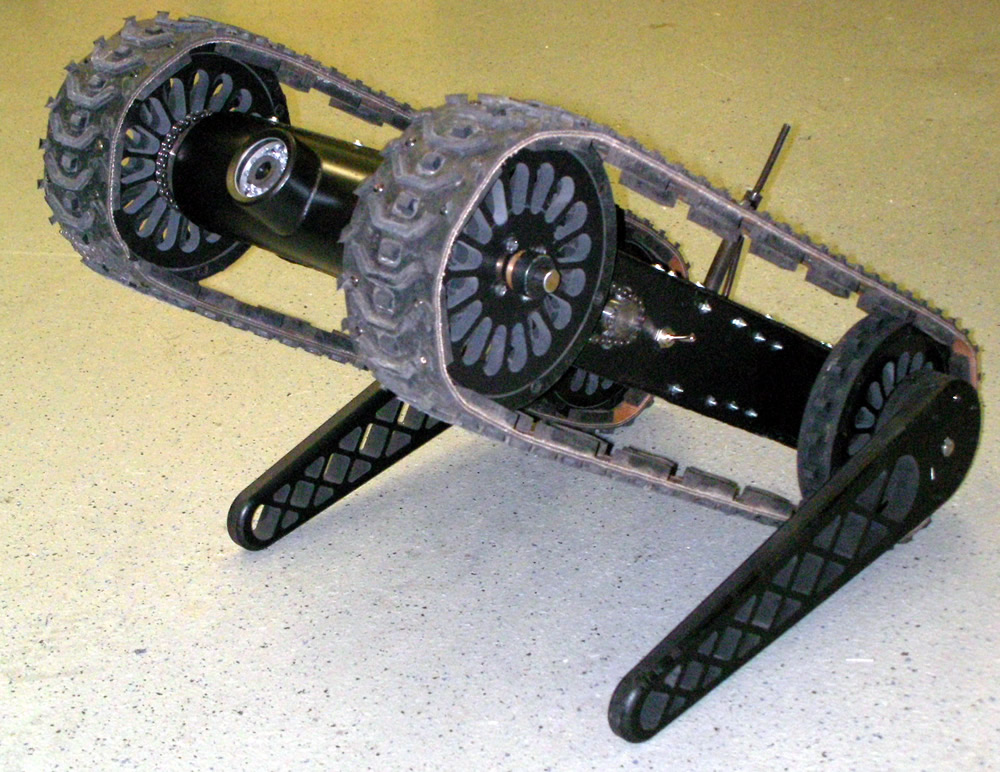
This is a customized LT-F robot. The patent pending LT-F has rear flipper/stabilizer arms allowing its short wheel base to easily climb stairs and get over very large obstacles. Review the data sheet for specifications and illustrations on how the arms are used to help it climb. You can also view videos of the robot here. For purchasing the LT-F kit, follow this link. For other custom LT and LT-F Robot kits see our prebuilt robot kits.
The standard robot has the upgraded positive traction wheels and treads. the wheels have teeth that pierce holes in the tread for a positive traction that tracks great, does not slip, and reject debris such as snow, sand, dirt, loose gravel, etc. The robot has a IR night vision camera in the front. The robot also has custom flipper arms attached to it. The robot also has a custom controller with a 5 inch color LCD for viewing the video images. This robot is very rugged. The wheels are a composite of rubber and ABS plastic. We designed and tested many wheels designs until we were able to get a reliable wheel and track system that tracked easily, was light weight, and robust. We have tested this wheel and tread design by driving it off roof tops of houses.Check out the videos of the robot on our LT-F support page. The robot as shown is less than 35lbs.
 |
 |
 |
| LT-F with custom controller. A 5" color LCD is mounted to a gamepad controller. The black box has a belt clip on it contains the wireless transceiver and LCD for displaying voltages and robot status. The robot is easily controlled with the standard PS2 gamepad controller. | LT-F using its flipper arms to lift the nose of the robot up. Using the flipper arms the robot can easily climb over obstacles that are as high as the robot is long. Check out the videos of the robot on our LT-F support page. | LT-F with the flippers extended out backwards to act as wheelie bars while ascending stairs, etc.�� The flipper arm can continuously spin, has speed and direction control, and is controlled with the PS2 controller pictured to the left. |
This custom robot is made from our standard stock LT-F robot and the customization can be turned around quickly. We can provide custom solutions to meet your needs too.
Contact us with specific needs and let us help you come up with a great tool.
Below is a image of the LT-F with clear tops and is controlled Spektrum RC controller

 The new LT and LT-F robots come with mounting brackets that mount to the back of the robot with a nylon strap so you can easily carry the LT Robot. The brackets straps are held in by the wheel tensioning bolts. The brackets are water jet cut to mate with the contour of the robot's chassis. Click on the picture on the right to view the details.
The new LT and LT-F robots come with mounting brackets that mount to the back of the robot with a nylon strap so you can easily carry the LT Robot. The brackets straps are held in by the wheel tensioning bolts. The brackets are water jet cut to mate with the contour of the robot's chassis. Click on the picture on the right to view the details.
